Çift Motorlu RC Model Kargo Uçağı Nasıl Yapılır?
Uzaktan Kumandalı kargo tipi model uçak yapımı.
RunCam II 4K Kamera: https://ban.ggood.vip/Wbol
İndirim Kuponu: BG30242
Mobius Mini Kamera: https://www.banggood.com/custlink/DKvyFArSNV
Teknik özellikler:
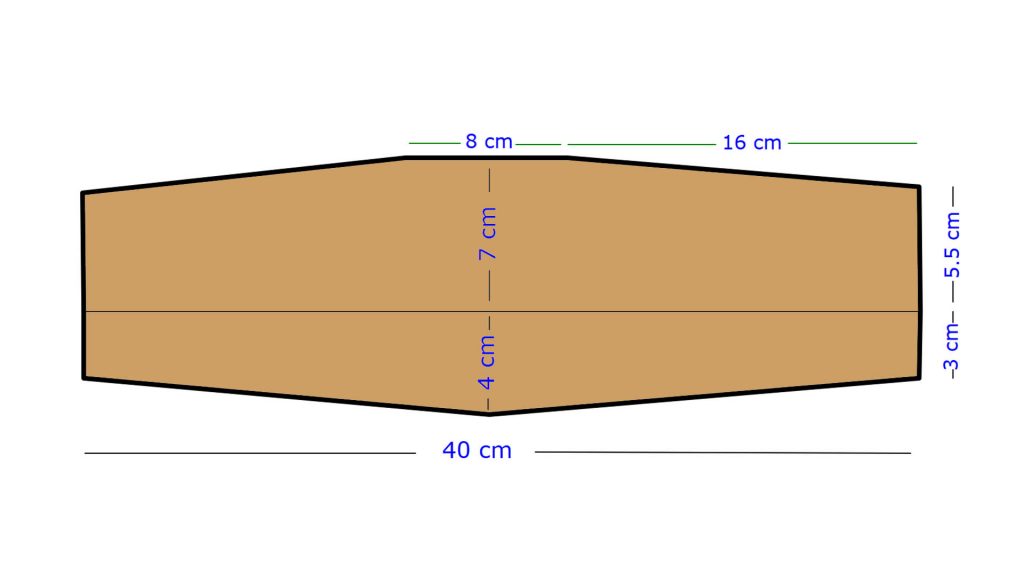
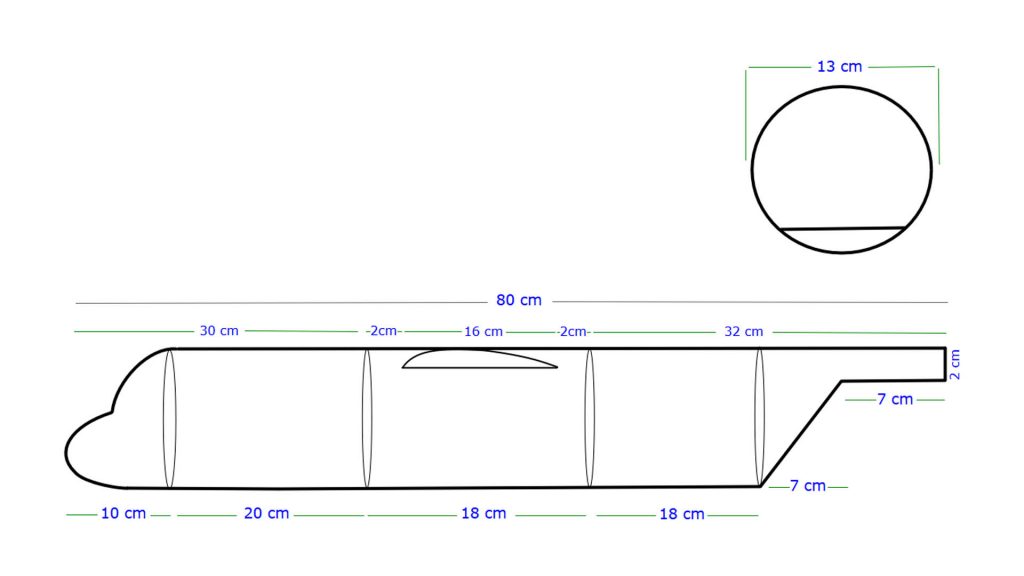
Gövde: 80 cm
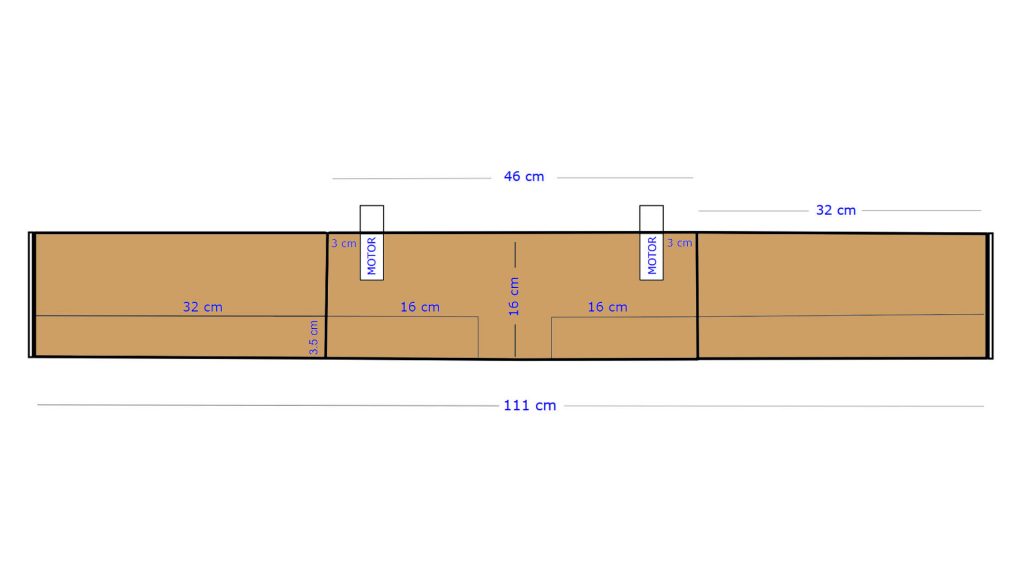
Kanat: 111 cm
Uçuş ağırlığı: Yaklaşık 1285 gr
Ekstra yük kapasitesi: yaklaşık 250gr-300gr (2200mah batarya ile)
Ağırlık merkezi (CG): 49mm – 55cm
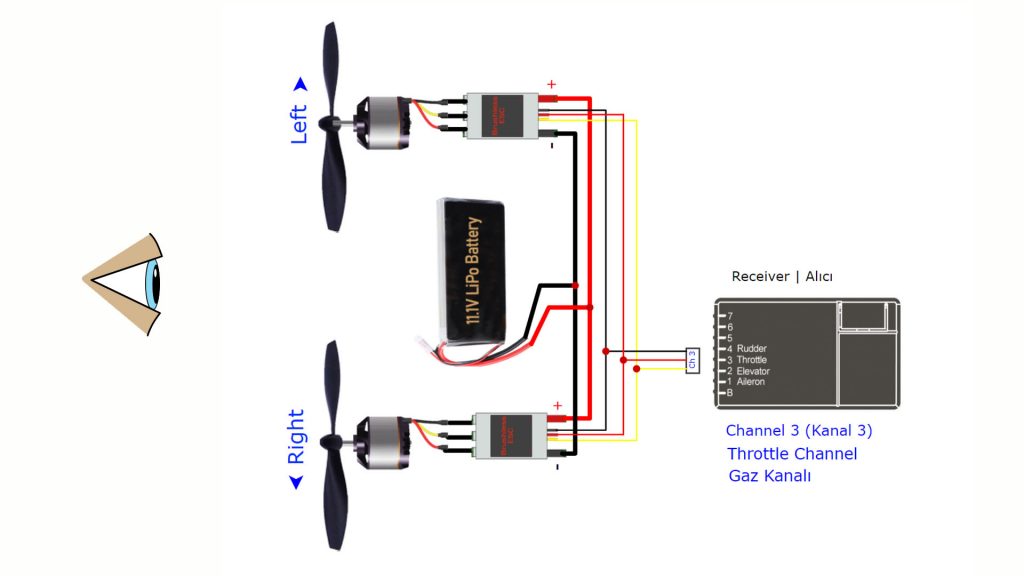
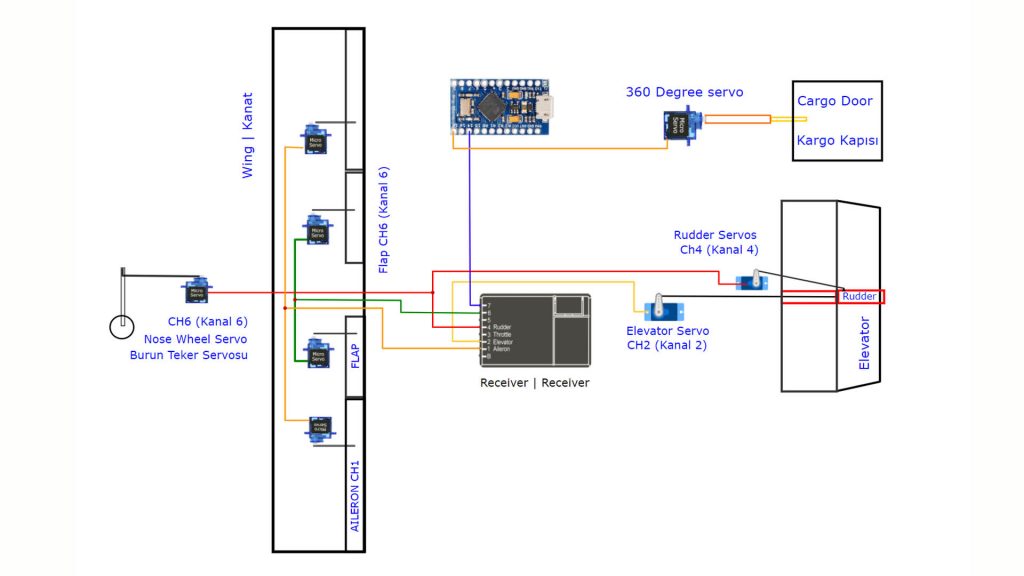
Uygun uzaktan Kumanda: Min. 6 kanal, 7 mikro servo + 1 Mikro 360 derece servo
Uygun pil: 11.1V 2200Mah – 3600Mah Lipo battery
Uygun motor: 2212 Fırçasız Motor (950-1400KV )
Uygun pervane: 8×6 (8060) CW & CCW
Uçuş süresi: Yaklaşık 7-8 dakika 2200mah LiPo ile / 13-15 dakika 3600mah LiPo ile
2212 1400KV Fırçasız Motor: https://bit.ly/37Hp1sT
8×6 pervane CW CCW: http://bit.ly/38WFFDR
30A Fırçasız ESC: https://bit.ly/3lxCisy
Uzaktan kumanda: RadioMaster TX16S Hall Sensör Gimbal https://ban.ggood.vip/VTSd
veya standart versiyon: https://bit.ly/3fXdhWN
11.1V 2200Mah LiPo: https://bit.ly/33PnzlU
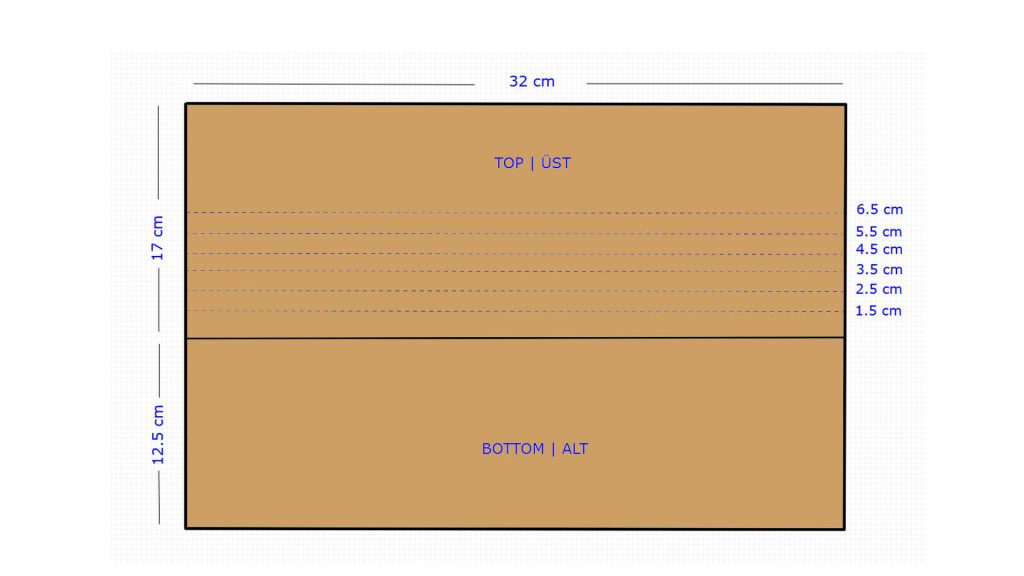
Kraft fotoblok 5mm (50×70 plaka) http://bit.ly/2WLfTO0
Yaylık çelik tel: https://bit.ly/33PNXML
40mm Tekerlek: https://bit.ly/37nn9VQ
9 gr mikro servo http://bit.ly/2Qin2T3
360 Derece Servo: bit.ly/3my7zNl
Güçlü mikro servo: https://bit.ly/2I1rXHT
Yeke: http://bit.ly/2NEUzpe veya https://bit.ly/3jhu9ay
Y Tipi Uzatma Kablosu: https://bit.ly/32R1xjL veya http://bit.ly/35wS0wk
Tekerlek stoperi: https://bit.ly/2XhYHQT
L Tipi Clevis: https://bit.ly/2T9ojOo
Kanopi Kilidi: http://bit.ly/30JnYo8
imax Balanslı LiPo Şarj Aleti: https://bit.ly/2ABnVlq
Diğer gerekli malzemeler:
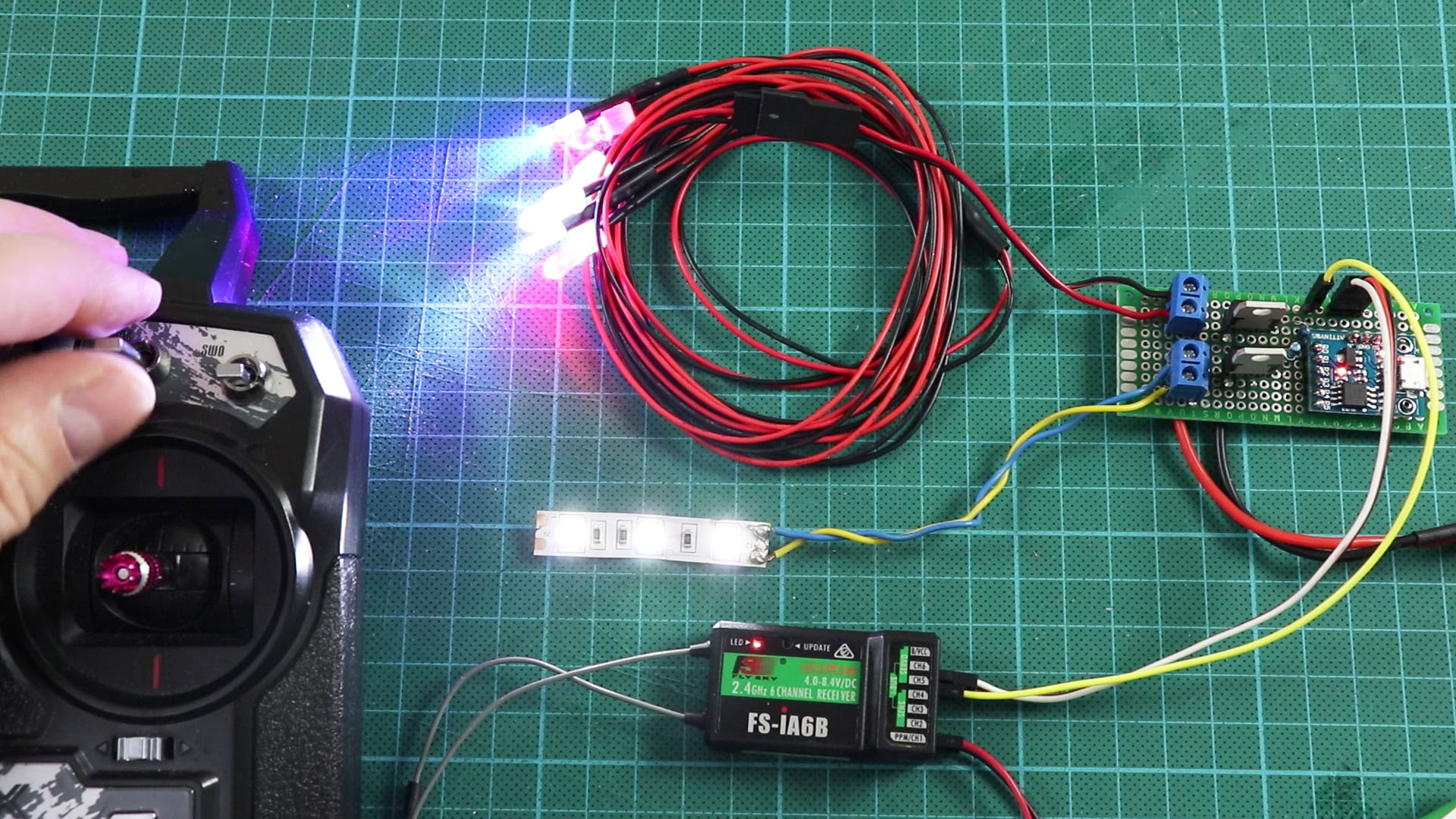
Arduino pro mikro
Mikro swtich
10K Direnç
120R Direnç
3mm Led
3D Printer STL Dosyaları: https://drive.google.com/file/d/1EMKbfYmYVTqkyg-Q6zprr8nJJw3oaChp/view?usp=sharing


Servo Durdurucu Arduino Kodu:
// This code allows the 360 degree servo to stop at mechanical limits and receive a control signal again.
// Bu kod, 360 derece servonun mekanik sınırlarda durmasını ve yeniden kontrol sinyali alabilmesini sağlar.
#include <Servo.h> // The library file must be installed on your computer | Kütüphane dosyası bilgisayarınızda yüklü olmalı
int servoPin = 10;
int radiosignal;
#define Button1 5
#define Button2 6
#define Led 2
Servo servo360;
void setup()
{
servo360.attach(servoPin);
pinMode(14,INPUT); // Receiver pin | Alıcı pini
pinMode(Button1, INPUT);
pinMode(Button2, INPUT);
pinMode(Led, OUTPUT);
}
void loop() {
radiosignal=pulseIn(14,HIGH);
// Read button | Butonları okuma//
if (digitalRead(Button1) == 1 and radiosignal <1200)
{
digitalWrite(Led,HIGH);
servo360.write(1500);
}
else
{
digitalWrite(Led,LOW);
servo360.write(radiosignal);
}
if (digitalRead(Button2) == 1 and radiosignal > 1800)
{
digitalWrite(Led,HIGH);
servo360.write(1500);
}
delay(10);
}