How to build an RC cargo model plane. Twin brushless motor cargo airplane.
Necessary materials:
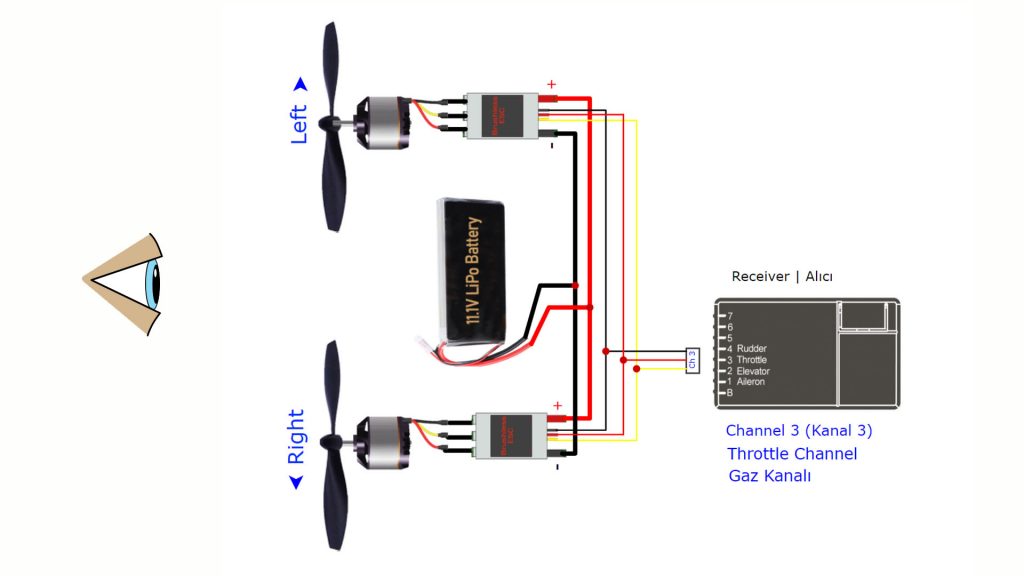
2212 1400KV Brusless Motor: https://s.click.aliexpress.com/e/_DlI9C0b
30A Brushless ESC : https://s.click.aliexpress.com/e/_DmdYS5l
11.1V 2200Mah (3S 2200mAh XT60): https://s.click.aliexpress.com/e/_DB1mC1p
35-40mm Wheel: https://s.click.aliexpress.com/e/_DBKUPzd
Pushrods: https://www.banggood.com/custlink/GDDKsmTBBz
2mm Rod For Landing Gear: https://s.click.aliexpress.com/e/_DlKITYT
Horns: https://s.click.aliexpress.com/e/_DDCKYlh
Radio control system: https://s.click.aliexpress.com/e/_DCPHEVN OR https://tr.banggood.com/custlink/vvGEUUB1Tq
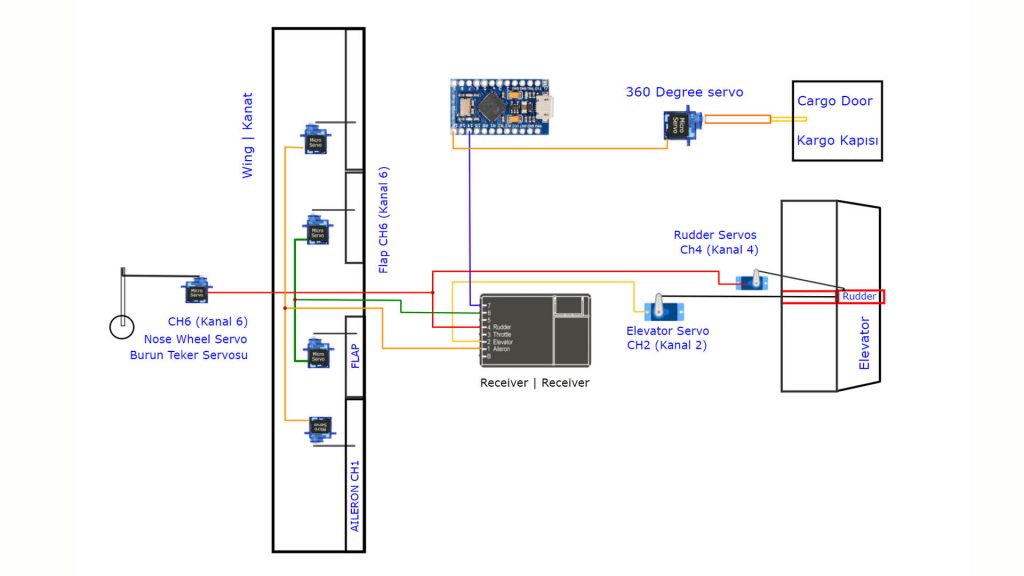
9gr micro servos: https://s.click.aliexpress.com/e/_DBlPszz
360 Degree micro servo: https://s.click.aliexpress.com/e/_DEX09tD
Wheel stopper: https://s.click.aliexpress.com/e/_DCcQYir
Y extension cable: https://s.click.aliexpress.com/e/_DegReWn
L type nylon clevis keper clip: https://s.click.aliexpress.com/e/_DkuA2an
Adjustable Linkage stopper (Easy Link): https://s.click.aliexpress.com/e/_Dkvqb51
Canopy Hatch Lock : https://s.click.aliexpress.com/e/_DE3cpQF
8×6 propellers (CW&CCW): https://s.click.aliexpress.com/e/_DCOHcLh OR https://www.banggood.com/custlink/v3mvq8Bajc
Arduino pro micro: https://s.click.aliexpress.com/e/_DFdPg9p
Micro Switch: https://s.click.aliexpress.com/e/_DFi3JF1
Lipo Battery Charger: https://s.click.aliexpress.com/e/_DF5pqlz OR
https://s.click.aliexpress.com/e/_DlwNzmj OR
Hot melt Glue Gun: https://s.click.aliexpress.com/e/_DkCDXLd OR
https://s.click.aliexpress.com/e/_DnDleen OR https://s.click.aliexpress.com/e/_Dl2EcLt
Onboard Camera:
RUN CAM II 1440P: https://s.click.aliexpress.com/e/_DkH4II7
RUN CAM II 4K: https://s.click.aliexpress.com/e/_DlDs9EB
3D Printer STL Files: https://drive.google.com/file/d/1EMKbfYmYVTqkyg-Q6zprr8nJJw3oaChp/view?usp=sharing
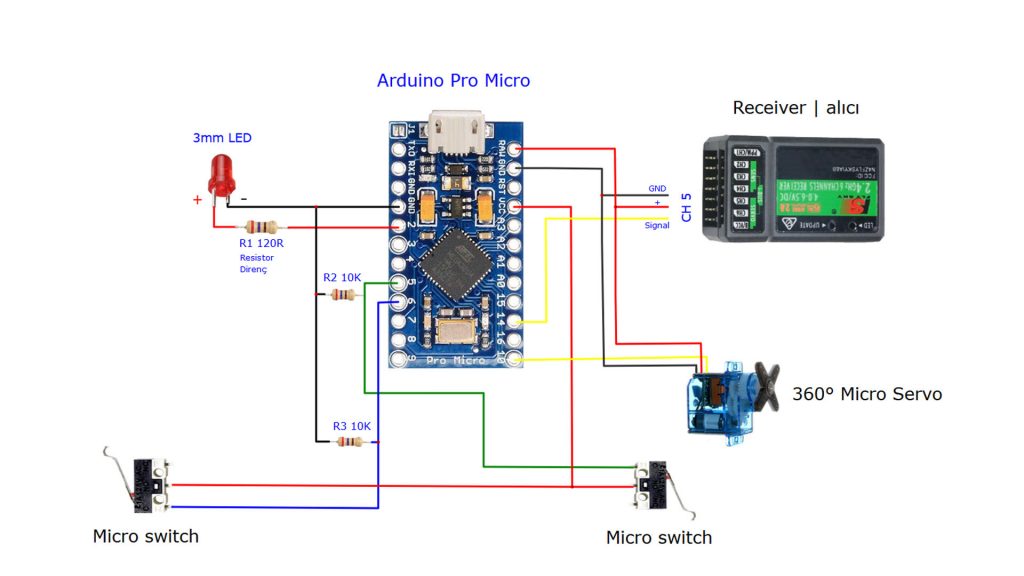
Servo Stopper Arduino Code:
// This code allows the 360 degree servo to stop at mechanical limits and receive a control signal again.
#include <Servo.h> // The library file must be installed on your computer
int servoPin = 10;
int radiosignal;
#define Button1 5
#define Button2 6
#define Led 2
Servo servo360;
void setup()
{
servo360.attach(servoPin);
pinMode(14,INPUT); // Receiver pin
pinMode(Button1, INPUT);
pinMode(Button2, INPUT);
pinMode(Led, OUTPUT);
}
void loop() {
radiosignal=pulseIn(14,HIGH);
// Read button | Butonları okuma//
if (digitalRead(Button1) == 1 and radiosignal <1200)
{
digitalWrite(Led,HIGH);
servo360.write(1500);
}
else
{
digitalWrite(Led,LOW);
servo360.write(radiosignal);
}
if (digitalRead(Button2) == 1 and radiosignal > 1800)
{
digitalWrite(Led,HIGH);
servo360.write(1500);
}
delay(10);
}
Technicial Specifications:
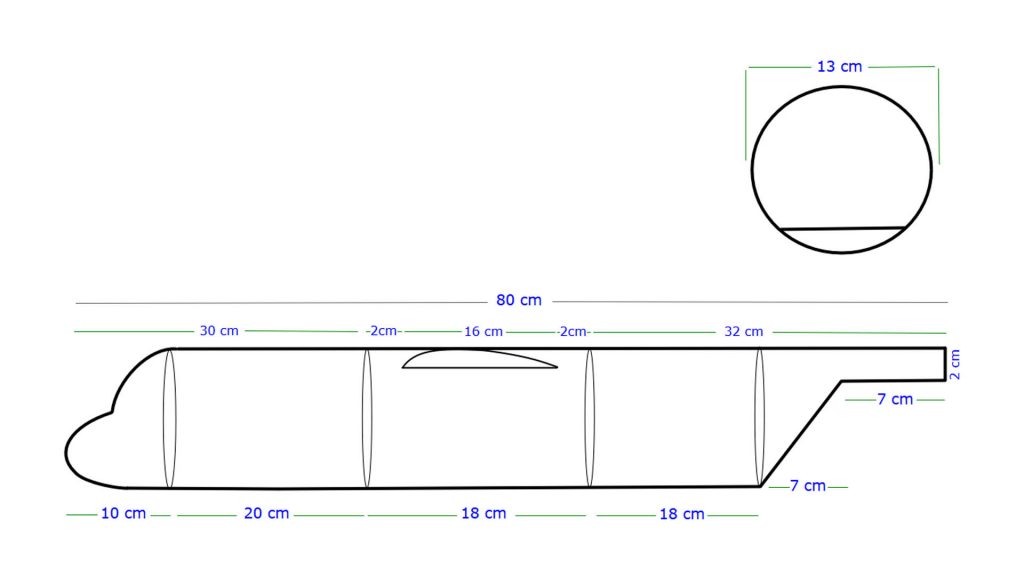
Lenght: 80 cm
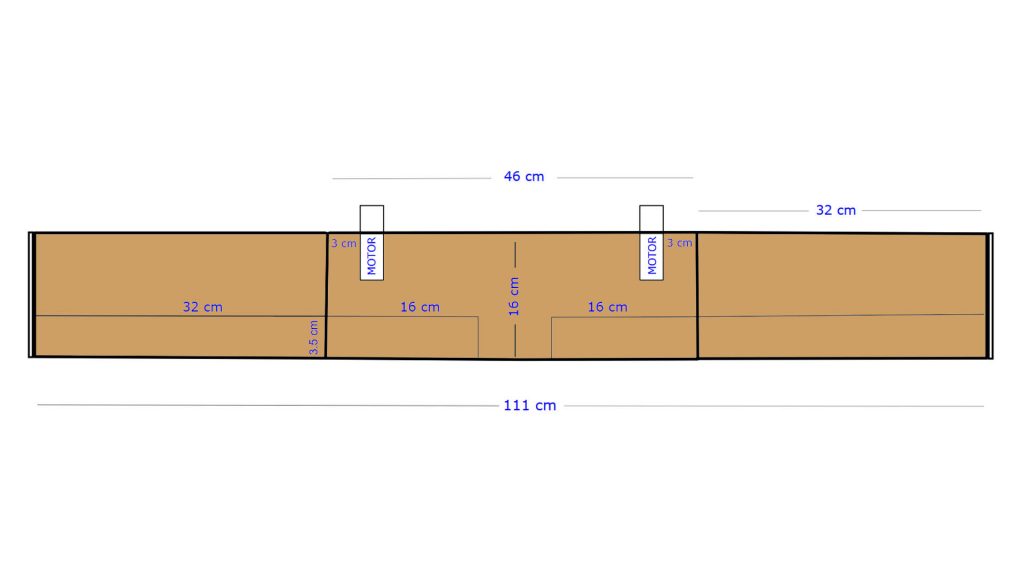
Wing span: 111 cm
Flight weight: About 1285 gr
Pay load: About 250gr-300gr (With 2200mah battery)
Center of gravity: 49mm – 55cm from the front of the wing
Required control system: Min. 6 channels, 7 micro servos + 1 micro 360° Servo
Suitable battery: 11.1V 2200Mah – 3600Mah Lipo battery
Suitable motor: 2212 Brushless Motor (950-1400KV )
Suitable propeller: 8×6 (8060) CW & CCW
Flight Time: About 7 minutes for 2200mah LiPo / about 13-15 minutes for 3600mah LiPo